Ferngelenkter Roboter untersucht Kofferbomben
Immer wieder werden an Flughäfen und Bahnhöfen herrenlose Gepäckstücke entdeckt. Ein Fall für die Sicherheitskräfte, die von mutmaßlichen Bomben ausgehen müssen. Es gilt, die potentielle Bedrohungslage schnell einzuschätzen, die möglichen Gefahren abzuwehren und Beweise für das Strafverfahren zu sichern. Ein ferngesteuertes Sensorensystem unterstützt die Polizei künftig bei ihren Einsätzen. Fraunhofer-Forscher entwickeln diese Sensor-Suite in Zusammenarbeit mit Industriepartnern und Kriminalämtern.

Einsatzkräfte der Polizei entschärfen eine Kofferbombe.
© Foto Landeskriminalamt Nordrhein-Westfalen
Wer an öffentlichen Plätzen, Flughäfen oder Bahnhöfen sein Gepäck vergisst, verursacht einen Großeinsatz der Polizei. Allein herumstehende Koffer, Taschen oder Rucksäcke sorgen immer wieder für Bombenalarm. Zwar erweisen sich die meisten der verwaisten Gepäckstücke als harmlos. Doch zunächst müssen die Einsatzkräfte von einer möglichen Gefahr ausgehen und prüfen, ob es sich um eine unkonventionelle Spreng- und Brandvorrichtung (USBV) handelt – sprich um ein explosionsgefährliches Objekt. Dabei müssen sie das Gepäck aus nächster Nähe untersuchen. Ein System, das eine rasche Einschätzung der Gefahrensituation ermöglicht und zudem den Gepäckinhalt, die Gepäckform sowie die Umgebung dreidimensional erfasst, würde die Arbeit der Spezialisten deutlich erleichtern, die Aufklärung beschleunigen und das Risiko für die Einsatzkräfte minimieren.
Seit November 2014 entwickeln Forscher des Fraunhofer-Instituts für Hochfrequenzphysik und Radartechnik FHR in Wachtberg ein solches System gemeinsam mit dem Landeskriminalamt Nordrhein-Westfalen, der Leibniz Universität Hannover, der ELP GmbH und der Hentschel System GmbH. Das Bundeskriminalamt Wiesbaden und die Bundespolizei begleiten das Vorhaben als zusätzliche Expertisengeber. Das Projekt »USBV-Inspektor« wird innerhalb des Programms »Forschung für zivile Sicherheit« vom Bundesministerium für Bildung und Forschung mit zwei Millionen Euro gefördert.
Sicherheitskräfte müssen nicht in den Gefahrenbereich
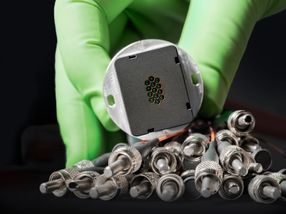
Bei dem intelligenten Einsatzhelfer handelt es sich um eine multimodale Sensor-Suite. Diese besteht aus einem Millimeterwellenscanner, einer hochauflösenden digitalen Kamera und einer 3D-Umgebungserfassung. Die Bestandteile sind in einem Gehäuse integriert und auf einer Roboterplattform montiert. Der Roboter wird von den Entschärfern aus sicherer Entfernung ferngesteuert. Die schwenkbaren 3D-Sensoren vermessen den Tatort dreidimensional, die digitale Kamera liefert hochaufgelöste Bilder für die spätere optische Beweissicherung. Der Millimeterwellensensor durchleuchtet die Gefahrenquelle und bildet das Innere ab. Ein auf dem Roboter integrierter Embedded-PC sammelt die Daten und sendet sie an die Ermittler, wo sie am Rechner per Sensordatenfusion zusammengeführt werden.
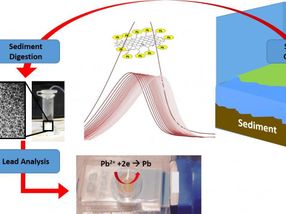
Inhalt der Kofferbombe wird dreidimensional vermessen
»Mit bisherigen Verfahren lassen sich Kofferbomben nicht dreidimensional darstellen, eine räumliche Zuordnung des Inhalts ist nicht oder nur bedingt möglich. Mit der Sensor-Suite können wir das Innere eines Gepäckstücks dreidimensional visualisieren und feststellen, aus welchen Teilen die Bombe besteht und wie diese im Gepäck angeordnet sind«, erläutert Stefan A. Lang, Teamleiter am FHR und Koordinator des Projekts. Somit können die Sprengstoffexperten die Bedrohungslage schnell beurteilen und haben zudem künftig die Möglichkeit, so viele Hinweise wie möglich zur Bombe zu erhalten. Bislang waren die Spezialisten oftmals gezwungen, die Kofferbomben zu zerstören, was die Ermittlung der Täter erschwert. Weitere Vorzüge des berührungslosen Detektionssystems: Es ist leicht, kompakt und plattformunabhängig, lässt sich daher auf beliebige Roboter montieren.
Die Forscher vom FHR entwickeln im Projekt den Millimeterwellenscanner, auch als Radarsensor bezeichnet, für die schnelle Aufklärung. Er erlaubt eine sehr hohe Tiefenauflösung. »Bei dem Radar wenden wir das SAR-Prinzip an, kurz für Synthetic Aperture Radar. Bei diesem Verfahren wird der Sensor über eine Trajektorie, eine Art Wegstrecke, bewegt – also beispielsweise von links nach rechts vor dem Koffer – und die so generierte Dopplerinformation für die Bilderzeugung benutzt«, erklärt Lang. Neben dem Sensor erforschen der Experte und sein Team zudem, wie die optimale Trajektorie zum Vermessen des Objekts ermittelt werden kann. Dies hängt von der Form des Gepäckstücks oder Behälters ab, seiner Position in der Umgebung sowie der Position des Roboters.
Ein Demonstrator des Radarsensors ist im April 2016 fertiggestellt. Umfangreiche Praxistests der ferngesteuerten Sensor-Suite starten Mitte 2017. 2019 soll die multimodale Sensor-Suite auf den Markt kommen.

Weitere News aus dem Ressort Wissenschaft












Holen Sie sich die Analytik- und Labortechnik-Branche in Ihren Posteingang
Ab sofort nichts mehr verpassen: Unser Newsletter für Analytik und Labortechnik bringt Sie jeden Dienstag auf den neuesten Stand. Aktuelle Branchen-News, Produkt-Highlights und Innovationen - kompakt und verständlich in Ihrem Posteingang. Von uns recherchiert, damit Sie es nicht tun müssen.